根据测试结果分析,Netbox 能较好地实现CHB-4的硬件电路模型,且端口电气量测量效果良好。仅需配置相应的端口即可完成硬件在环模拟,且基于Matlab/Simulink实现方式具有上手快、通用性强的特点,在完成端口配置的基础上可以实现免培训操作。



-
首页
-
解决方案
- ꀶ 电力电子教学实验解决方案
- PPEC-HIL 电力电子设计开发创新实验系统
- RCP+HIL 电力电子实时仿真创新实验系统
- RCP+功率硬件 多端口能量路由实时控制仿真系统
- RCP+功率硬件 三相全桥PRCP开发套件实验系统
- ꂓ 电驱系统实时仿真解决方案
- 信号级电驱控制测试解决方案
- 双电机实时仿真测试解决方案
- 三电机实时仿真测试解决方案
- 六相永磁同步电机实时仿真测试解决方案
- ꀢ 分布式能源实时仿真解决方案
- 微网仿真测试系统解决方案
- 光伏逆变器在环测试解决方案
- 风电机组变流器测试解决方案
- 储能逆变器在环测试解决方案
- 链式SVG系统实时仿真解决方案
-
客户案例
-
产品中心
- 硬件产品
- ꁦ EGBox Max
- ꁦ EGBox
- ꁦ EGBox Mini
- ꁦ EGBox Nano
- ꁦ PXI Box
- ꁦ CBox
- ꁦ NetBox
- 软件及工具包
- ꀖ EasyGo DeskSim
- ꀖ EasyGo RealTime Block
- ꀖ EasyGo Machine Block
- ꀖ EasyGo FPGACoder Block
- 科研支持计划
-
技术支持
-
新闻动态
-
关于我们
-
RCP+HIL 新能源系统实时仿真
-
首页
-
解决方案
- ꀶ 电力电子教学实验解决方案
- PPEC-HIL 电力电子设计开发创新实验系统
- RCP+HIL 电力电子实时仿真创新实验系统
- RCP+功率硬件 多端口能量路由实时控制仿真系统
- RCP+功率硬件 三相全桥PRCP开发套件实验系统
- ꂓ 电驱系统实时仿真解决方案
- 信号级电驱控制测试解决方案
- 双电机实时仿真测试解决方案
- 三电机实时仿真测试解决方案
- 六相永磁同步电机实时仿真测试解决方案
- ꀢ 分布式能源实时仿真解决方案
- 微网仿真测试系统解决方案
- 光伏逆变器在环测试解决方案
- 风电机组变流器测试解决方案
- 储能逆变器在环测试解决方案
- 链式SVG系统实时仿真解决方案
-
客户案例
-
产品中心
- 硬件产品
- ꁦ EGBox Max
- ꁦ EGBox
- ꁦ EGBox Mini
- ꁦ EGBox Nano
- ꁦ PXI Box
- ꁦ CBox
- ꁦ NetBox
- 软件及工具包
- ꀖ EasyGo DeskSim
- ꀖ EasyGo RealTime Block
- ꀖ EasyGo Machine Block
- ꀖ EasyGo FPGACoder Block
- 科研支持计划
-
技术支持
-
新闻动态
-
关于我们
-
RCP+HIL 新能源系统实时仿真
EasyGo使用笔记丨谐波齿轮传动系统控制算法调试验证
“Easygo 仿真平台接口丰富,界面灵活配置,可直接运行 simulink控制算法,控制速率最快可达几百kHz,很好的实现了谐波齿轮传动系统控制算法的调试验证。”
——北京航空航天大学某团队
▶产品试用申请:私信回复关键词【试用】,获取试用名额
谐波齿轮传动机构发明于20世纪50年代,利用挠性齿轮的可控弹性形变实现力矩和运动的转换和传递,运行时因挠性齿轮顶点呈谐波状变化而得名。由于具有近零齿隙、体积小、质量轻、噪音小、精度高、单级传动比大、负载能力强、传递效率高和同轴装配等优点,谐波齿轮传动广泛应用于航空航天、仿生智能机械、军事武器和医疗器械等领域。
随着航空航天科技的发展,对空间机械臂、太阳能帆板、通信和姿态控制机构等功能器件运行的精确性与稳定性提出了更高的要求。然而在外太空环境中,传动机构工作条件恶劣且受多源干扰耦合影响,因此研究谐波齿轮传动机构的动力学特性,设计抗干扰控制有助于提高传动系统的智能化和伺服性能。

谐波齿轮传动实验台示意图
现有的谐波齿轮传动系统建模与控制研究主要集中在工作机理研究和动力学建模研究两方面,较少考虑伺服传动环节抗干扰研究,且多数控制研究局限于传动系统单一特性,如传动误差、挠性刚度、摩擦和迟滞,此外控制方法多为基于模型的前馈补偿控制。针对谐波齿轮传动系统存在的多源干扰,提升传动系统精度、降低伺服能量消耗,使用复合分层抗干扰控制是必需的,否则传动系统传递精度受限。

图谐波齿轮传动实验台机械设计图
本文为大家分享利用 EasyGo 仿真平台来验证谐波齿轮传动位置控制算法。对此,将基于 EasyGo Cbox 实时仿真器搭建的仿真测试系统,按照规程对谐波齿轮传动系统进行系列测试,验证了EasyGo 仿真平台的准确性与可靠性,为用户提供高效、安全的测试平台。
测试包括不限于:
-
可测量电机端的输入电流、输出力矩、角速度和角位置
-
可测量谐波减速器输出端的输出力矩、角速度和角位置
-
具有可视化实时采集和记录系统所测量各个物理量的功能
-
具有可以伺服控制的负载力矩模拟加载功能
-
可开发不同补偿控制方法对传动系统进行闭环控制,并对相应的伺服控制效果进行验证和评估
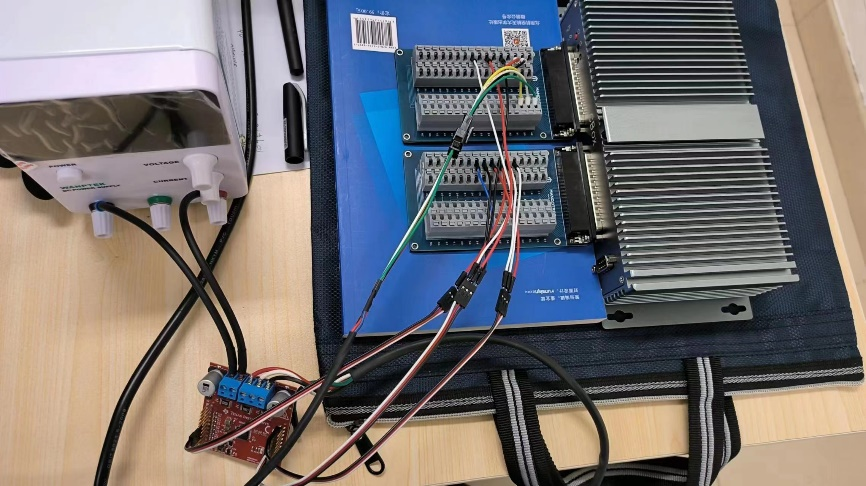
实验台CBox 驱动部分电气连接图
实验使用了Easygo基于实时CPU+FPGA架构的CBox仿真机和EasyGo DeskSim 仿真软件。CBox 通过物理IO 对接进行控制测试,既可以基于CPU做20Khz的算法控制,又可基于FPGA 做几百K的高速算法控制;搭配上位机软件DeskSim,无需编译,可直接下载运行 Simulink搭建的控制算法,助力先进控制算法在电力电子与电力传动领域中的创新实践。

谐波齿轮传动实验台实物图
为验证所提出控制方法的有效性,分别从跟随效果和抗扰效果两方面对谐波齿轮传动系统进行仿真对比研究,选取经典PID+前馈摩擦补偿作为对比方法,参考和干扰信号的描述以及控制参数列于表 1 中,系统模型参数列于表 2 中。
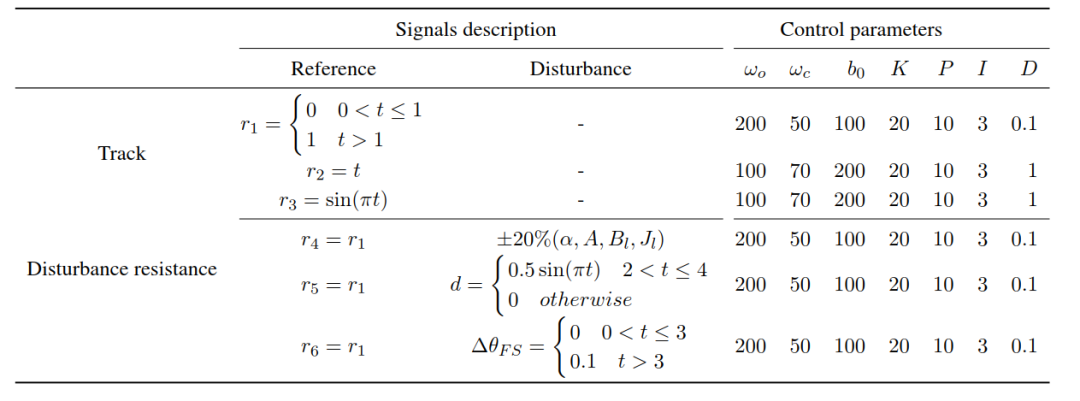
表 1 信号描述和控制参数
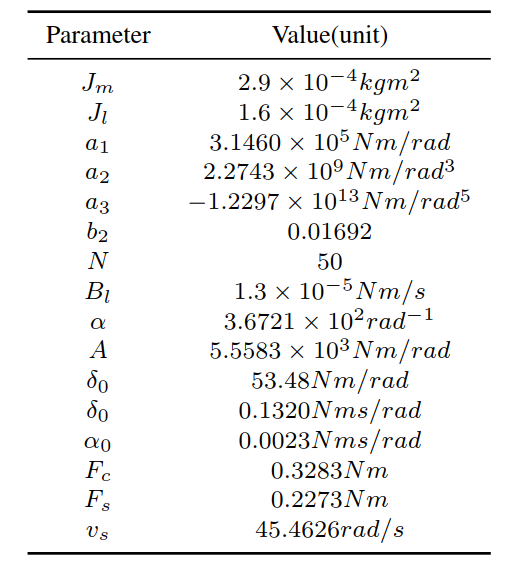
表 2 谐波齿轮传动系统的模型参数
实验中 CBox 仿真机采集电流、位置和力矩信号,生成控制伺服驱动 MOSFET 通断的 PWM 信号。对谐波齿轮传动系统中固有的传动误差、挠性刚度、摩擦和迟滞等多源干扰,设计抗干扰控制方法,成功通过物理实验验证了算法的有效性。

_04.jpg")
_07.jpg")
_09.jpg")
2023年3月3日 18:00
ꄘ浏览量:0
